PANASONIC TM-1600

Saklı Tel Taşıyıcı Hortum
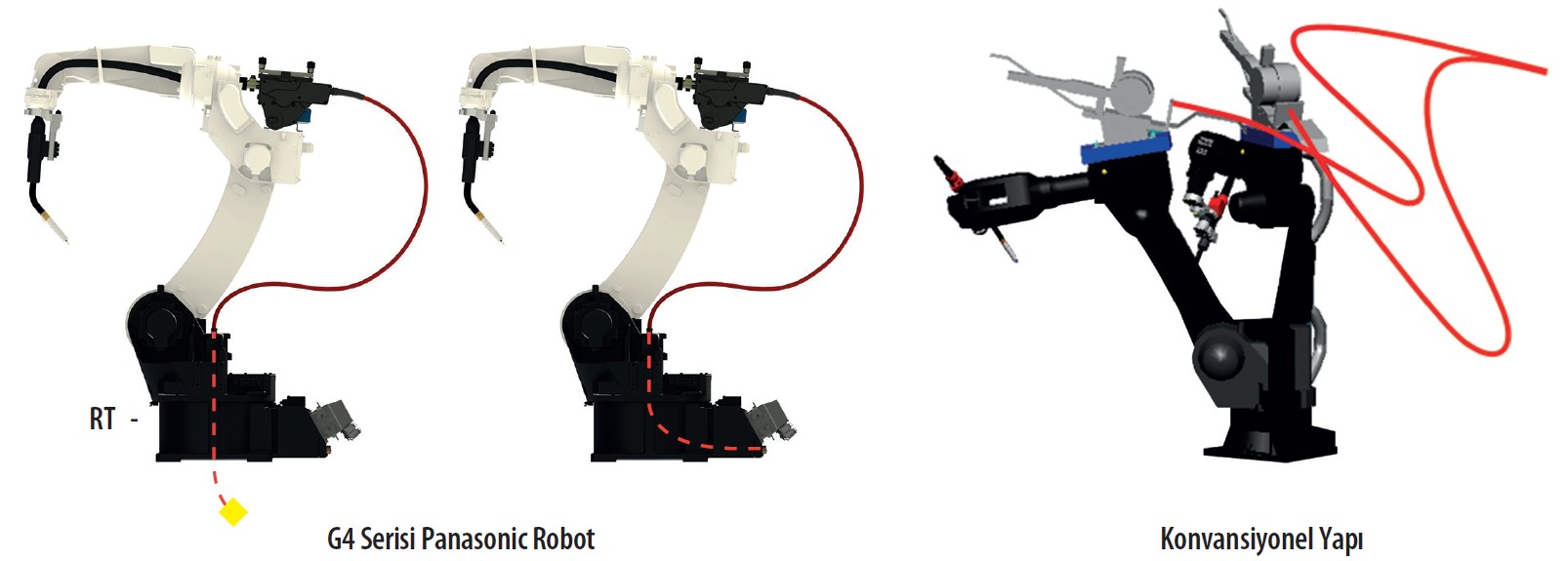
Kaynak telini tel sürme ünitesine taşıyan hortum robotun 1. ekseni olan RT ekseninin ortasında bunun için tasarlanmış kanal içerisinden geçer. Böylelikle robot hareket halindeyken tel taşıma hortumunun robotun arka tarafında bağımsız bir şekilde sağa sola sallanması sebebiyle oluşan tel sürme problemlerinin önüne geçilirken hem daha derli toplu bir görüntü sağlanır hem de kablonun bir engele takılıp zarar görme riski ortadan kalkar. Bu yapı ile kaynak teli RT ekseninden geçmeden önce istenirse robotun altından istenirse de robotun arka tarafından giriş yapabilir.
Sabit Kablo Grupları
Akım kablosu da tel taşıma hortumu gibi robotun RT ekseninden geçer. Böylelikle robotun hareketlerinden etkilenip aşınmaz veya çevredeki bir yere takılıp kopma riski olmaz. Haberleşme kabloları ise robot alt gövdesine sabittir.

A-Akım Kablosu Çıkışı B-Akım Kablosu Girişi C-Haberleşme Kabloları
Esnek Kol Yapısı
Robot kol yay şeklinde tasarlanmıştır. Böylelikle fikstürlere daha fazla yaklaşılabilir ve istenilen torç açılarına da kolaylıkla ulaşılabilir.

Kolay TCP (Tool Center Point) Ayarı (Torç Merkezleme)
Robot kol üzerinde sabit bir TCP ayar noktası vardır. Torcun ilk bağlantısında da kullanılan bu nokta sayesinde ihtiyaç durumunda kolaylıkla torcun TCP ayarı yapılabilir.
